Cominciamo con l'aumento della portata del radio comando,
una volta aperto noterete che c'è di fabbrica un filo antenna di 31 mm pari ad un quarto d'onda a 2,4 GHz.
Inoltre il tappino
finta antenna è facilmente estraibile ed è vuoto all'interno.
A batterie cariche trovate un bel vialone libero o un parco ed una persona che vi aiuti.
Date il qud a chi ti sta aiutando e lo fate allontanare diciamo 40 m, loaccende e ve lo poggia per terra.
Accendete il radiocomando e provate a sincronizzarlo con il normale movimento su e giù della leva del gas.
Sollevatelo
almeno un metro e fatelo poi atterrare,
spegnete il radiocomando.L'amico vi sposta il drone a 50 metri , riaccendete il radiocomando e ripetete il tutto.
Se proprio ce la fà ripetelo anche a 60 metri.
Sicuramente non parte più, insomma cercate di capire a quale distanza il drone non risponde più al radiocomando
in modo che ritornando sullo stesso posto potete vedere le differenze tra il drone originale e quello modificato.

Prendete nota da quale a quale palo/punto del marciapiede/albero etc avete pilotato il drone.
Se siete proprio a digiuno con l'elettronica ma ritenete di saper fare almeno una saldatura semplice su un filo fate così:allungate i fili sia nel drone che nel radiocomando aggiungendo 35 mm di filo.
E' la modifica dove la possibilità di danneggiare il drone è praticamente quasi 0.Aprite le parti con cautela, telecomando e drone,
segnatevi dove vanno le viti perchè sono di lunghezza diversa.Scoprite un paio di mm sia sui fili dei dispositivi e sia dei 2 spezzoni da almeno 40 mm
stagnate le 4 punte che avete scoperto poi saldate uno spezzone per ogni dispositivo, uno nel radiocomando ed uno nel drone.
poi con un righello millimetrato o un calibro verificate che la lunghezza totale sia 64 mm tagliando il filo aggiunto di troppo
infine isolate la giunzione con un pezzetto di termorestringente.
Nel radiocomando inserite l'antenna allungata nel finto tappo antenna.
Ripetete l'operazione nello stesso vialone o parco con l'amico che vi aiuta
e riportate le misure del prima e dopo quà sul forum ed anche le vostre osservazioni.
Per chi invece ritiene di saper saldare discretamente ed abbia un buon saldatore e stagno fino.....

và benissimo anche un filo elettrico fino e morbido,mi raccomando non superate i 65 mm.
Prendete il pezzetto di filo elettrico da 65 mm, spellate 2 mm e stagnate, la plastica di copertura arretrerà di un altro mm o due,
poi dissaldate via il vecchio filo e saldate il nuovo al suo posto,
vi serve un saldatore piccolo e mano ferma oltre a pochissimo stagno fino.Fatevi aiutare da un amico appassionato di elettronica o un centro assistenza se ritenete complicata la operazione.
In entrambe le modifiche , che si equivalgono, già così superate i 60 metri di comando in qualsiasi condizione,
se serve ancora più distanza di comando ricordate che andare oltre significa usare antenne particolari.

Ma ricordate pure che 60 metri sono pari ad un grattacielo di 16 piani.....

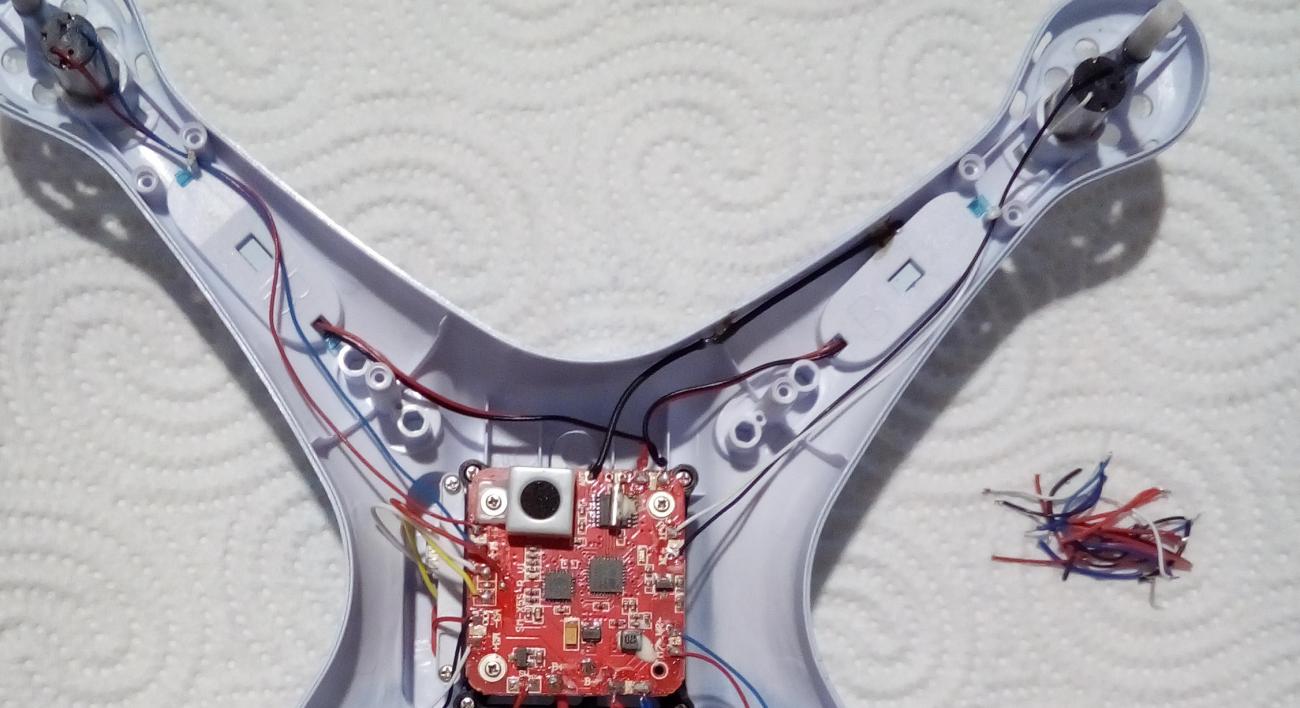
A seguire lna modifica di antenna nel quad, eliminando anche 2 grammi di inutili cavi,
ricavando una spinta di 34 grammi invece dei 32 grammi di fabbrica,
semplice recupero della potenza dispersa nei cavi.
FATELO SE SIETE MOLTO ESPERTI NELLE SALDATURE,
altrimenti allungate solo il filo della antenna ponendolo lontano dagli altri cavi,
serve ad evitare interferenze e perdita di segnale,
fissate la nuova antenna con un goccio di colla calda

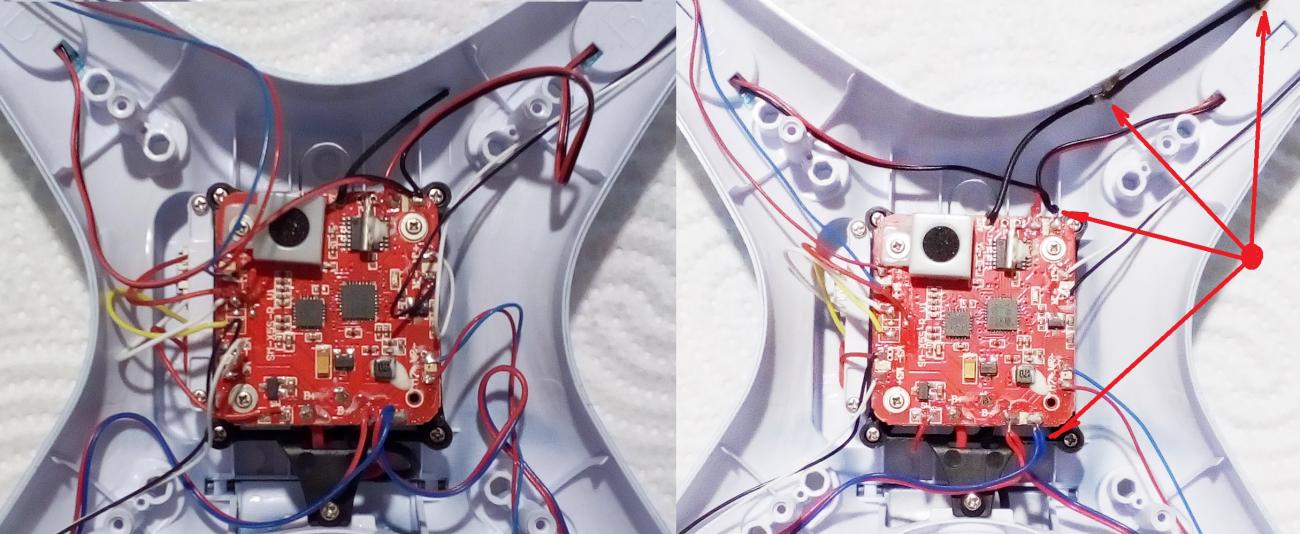
Nella immagine il quad prima e dopo la modifica,
la antenna è segnalata dalla freccia immagine in basso a sx:
Lo schema del radiocomando:
Infine come modificare il tx syma per alimentarlo con una
vecchia LiPo(

quelle gonfie da zampogna sono perfette

)
ed ottenere una trasmissione più potente almeno del 25% 
Come funziona:
La LiPo carica arriva sino a 4,2Vdc, il diodo in serie ne leva almeno 0,4 Vdc per cui il solo circuito TX ed il display
verranno alimentati a 4,2-0,4=3,8Vdc
La resistenza leva almeno altri 0,1 Vdc, per cui al circuito trasmettitore costruito per funzionare a 3,3 Vdc arrivano 0,4Vdc in più.
La potenza in trasmissione aumenta visibilmente.
La "qualità" del pilotaggio migliora anche esso, perchè il circuitino stabilizzatore del TX NON dovrà più alimentare
ne la parte RF e neanche il display per cui gli si leva un carico di almeno il 60% di corrente che doveva supportare,
non scaldando più la sua uscita è più stabile a 3,3 Vdc e questa tensione alimenta anche gli stick di pilotaggio.
Più questa tensione è stabile è migliore sarà l'hoovering. 



 .
. Richiede la quasi totale assenza di vento causa scarso peso dell'apparato.
Richiede la quasi totale assenza di vento causa scarso peso dell'apparato.
 Tutti i ricambi disponibili a 4 soldi.
Tutti i ricambi disponibili a 4 soldi.